Currently, in the automotive industry, autonomous driving and driving assistance functions are gaining attention as next-generation technologies. The industry aims to realize smarter mobility systems by integrating information from multiple sensors such as multi-eye cameras, omnidirectional cameras, Radar, and LiDAR.
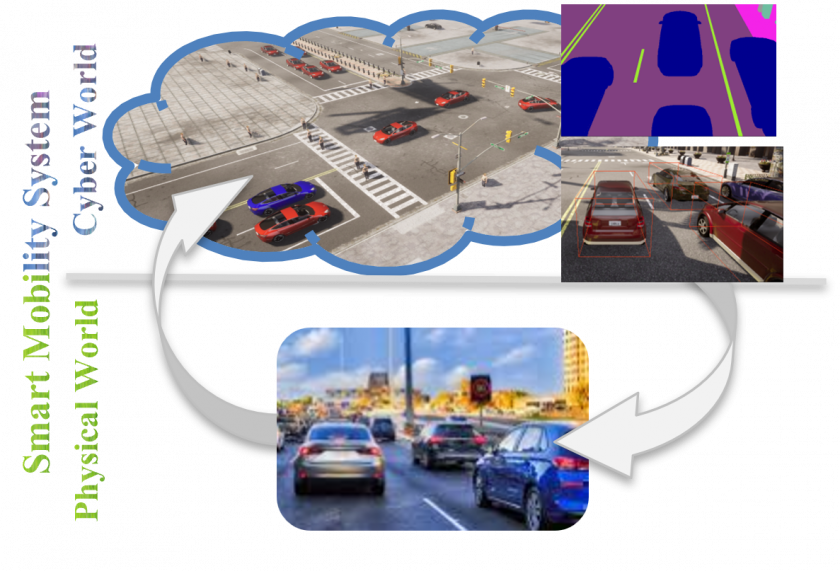
In particular, in the world of Vehicle-to-Everything (V2X), it is believed that various driving situations, such as hazard prediction and optimal traffic conditions, can be realized by sharing the world perceived by one vehicle with other vehicles. The digital twin envisioned in this research reconstructs information obtained in the physical space on cyber space, and is realized by sharing this cyber space among vehicles. This digital twin space requires high real-time performance and reliability.
- Real-time V2X Communication Using ROS2
- Tele-Operation Technology Utilizing Digital Twin Space
- Object Detection Model Training Using Distributed Federated Learning